ステッピングモーターの接続状態
KINGROON KP3S純正のステッピングモーターのピン配列は以下の通りだ。ピンの名称としてACBDが振られている。
後述するが、このステッピングモーターではAとC、BとDがペアだ。Titanエクストルーダー版のKP3S 2.0、KP3S 3.0に使われている薄型ステッピングモーター(俗にパンケーキステッパーと呼ぶ)も同じ配列になっている。
KINGROON KP3Sに搭載されているマザーボードである「KingRoon KP3 V1.2」のステッピングモーターのコネクター(JST XHの4ピン)の配列は恐らく以下の通り。画像はMKS Robin Nano V2のもの。

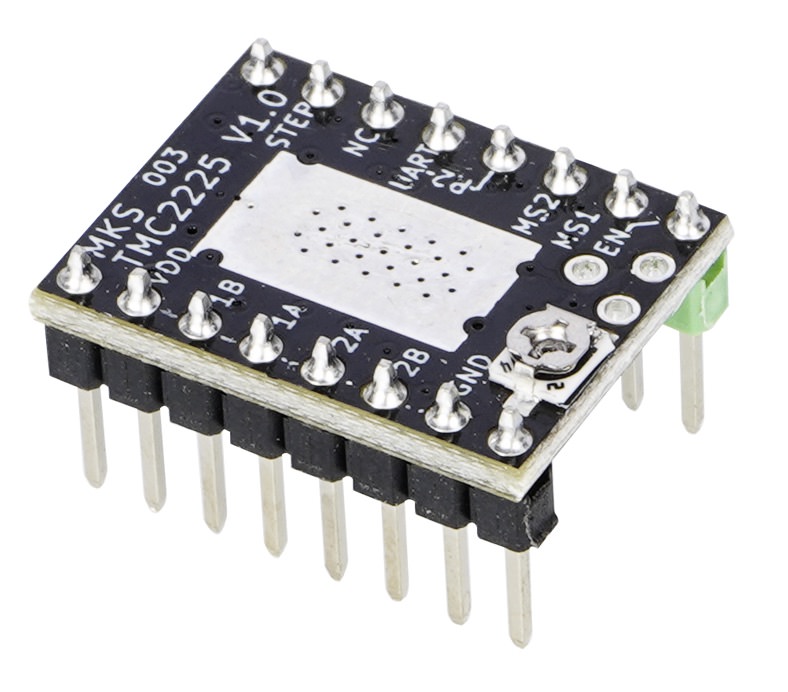
実際にはヒートシンクで見えなくなっているが、KINGROON KP3Sに搭載されているステッピングモータードライバーTMC2225のピン配列参考画像。心配ならTMC2225上のピンと、コネクターとで導通を確認すれば「KingRoon KP3 V1.2」のコネクターの配列が確認できる。
KINGROON KP3Sのマザーボードと、ステッピングモーターとの接続は以下のようになっている。
| コイル | マザーボード側 | ステッピングモーター側 |
|---|---|---|
| コイル1 | 2B | A |
| 2A | C | |
| コイル2 | 1A | B |
| 1B | D |
ステッピングモーター側のコネクタは、JST PHの6ピン。
このコネクタを入手する場合、以下が最安だと思われる。
二つあるのは配線の100mmと200mmの違い。
100mmの方は両端にコネクタが付いているが、200mmの方は片側にしか付いていないので、100mmの方が得。
100mmの方は写真が7ピンになっていて不安だったので筆者は200mmの方も買ってみたが、届いたのはどっちも6ピンだった。
JST PHはコネクタから端子を抜くのが比較的容易だ。
新しく端子を圧着して配線を作り直す場合は、以下にノウハウを書いておいたので参考にしてほしい。
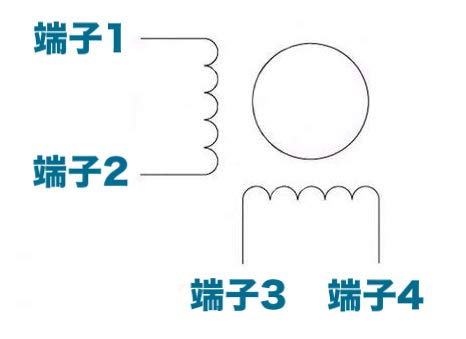
ステッピングモーターの端子名の名称と組み合わせ
なぜかステッピングモーターの端子配列は品種ごとにバラバラで、なおかつ端子名称が異なり、配線の色も統一されていないので混乱の元。
ステッピングモーターを交換する際に困ることもあろうかと、関連情報をまとめておいた。
下掲の表は、色が同じものが同じ端子であることを表現している。端子の名称には4種類の表記があるわけだ。
ただし、この色は筆者がこの作表上の都合で決めただけで、実際の配線色とは無関係なので注意してほしい。
黒と緑、赤と青はペアを意味する傾向もあるようなので、それに準じて色を決めてはいる。
1A、2A、1B、2Bという表記はステッピングモータードライバー、マザーボード上の端子名称、つまり送り出し側に使われる傾向がある。
1、2はコイルの別を表し、A、Bは正極、負極を表すようだ。
それ以外はモーターの端子名称として使われる傾向がある。
| コイル1 | 端子1 | A+ | A | A | 1A |
| 端子2 | A- | Ā | C | 1B | |
| コイル2 | 端子3 | B+ | B | B | 2A |
| 端子4 | B- | B̄ | D | 2B |
ステッピングモーターの回転を逆転させるために、送り出し側とモーター側との組み合わせは入れ替わることがある。
Iverntechのパンケーキステッパーを接続するには
Titanエクストルーダー、BMGエクストルーダーなど1/3の減速ギアの入っているエクストルーダーをKINGROON KP3Sに装着する場合、薄くて軽い、いわゆるパンケーキステッパーへの交換を考えるだろう。
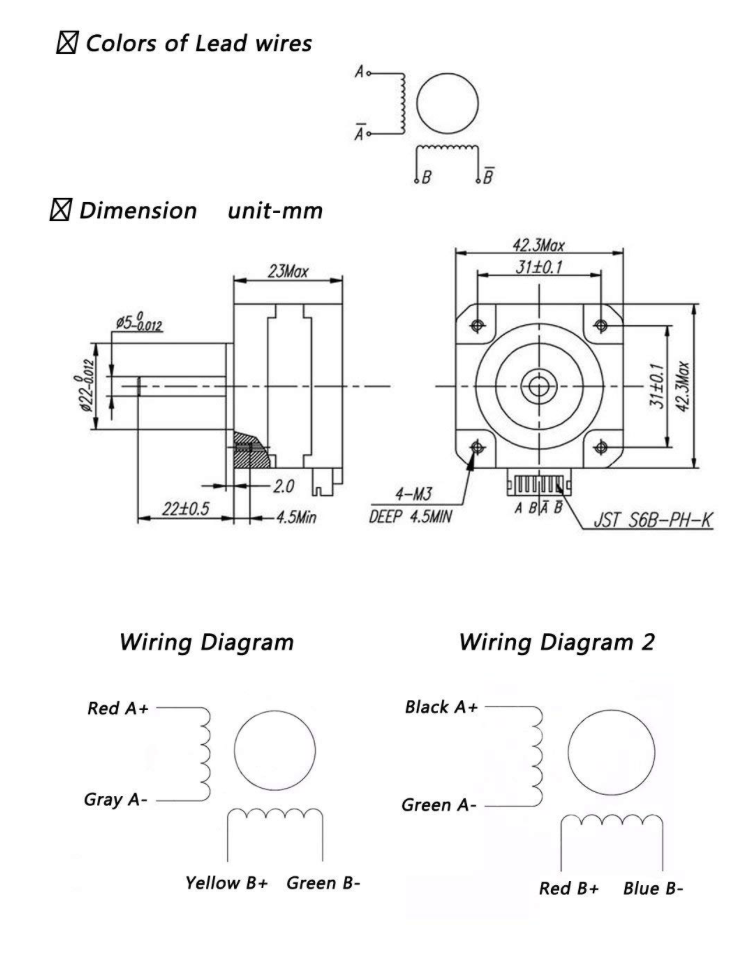
2021年9月現在、国内で入手しやすいパンケーキステッパーといえばIverntechのもの。
KINGROON KP3S純正のステッピングモーターと同じく、コネクターはJST PH 6ピンで、御誂え向きと思うかもしれない。
しかし、実際はIverntechのものとKINGROON純正のものとはピン配列が異なっており、そのまま接続しても動かない。

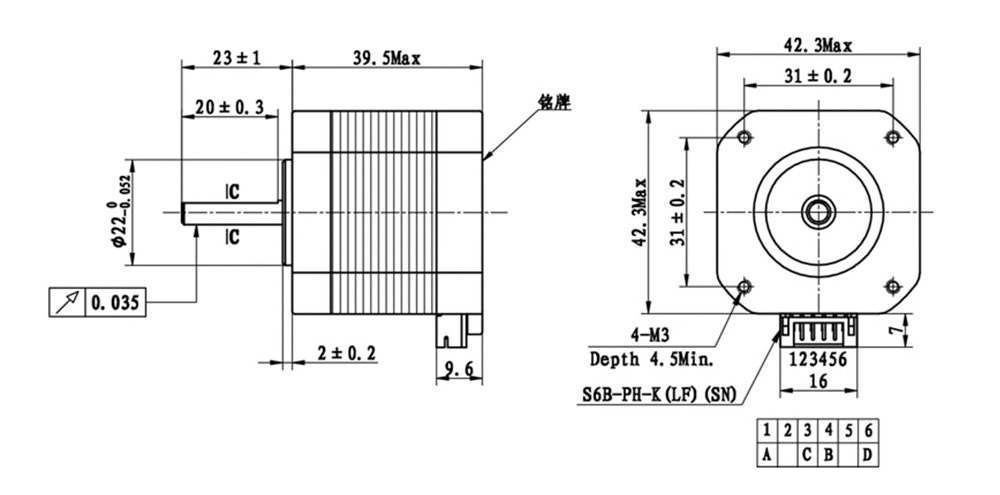
このIverntechのステッピングモーターのピン配列は以下のようになっている。
KINGROON KP3S純正のステッピングモーターと、このIverntechのステッピングモーターの、コネクターの配列を比較すると下表のようになる。
ステッピングモーターを回転軸側から見て、コネクターの左から1〜6と番号を振った。両者2と5が未使用なのは同じだ。
| JST PH 6ピン ピン番号 | KINGROON | Iverntech | ||
|---|---|---|---|---|
| 1 | コイル1+ | A | コイル1+ | A |
| 2 | ||||
| 3 | コイル1- | C | コイル2+ | B |
| 4 | コイル2+ | B | コイル1- | Ā |
| 5 | ||||
| 6 | コイル2- | D | コイル2- | B̄ |
KINGROONの方は、1〜3がコイル1の+-、4〜6がコイル2の+-という順番になっており、真ん中で二つに分かれる。
Iverntechの方は1と4がコイル1の+-、3と6がコイル2の+-といった感じにコイル1とコイル2が入り乱れる順番になっている。
さて、ここまで分かったところでIverntechのステッピングモーターをつなぐためにはどうすればいいのか?
3と4を入れ替えればいい。3と4を入れ替えると同じ配列になるのが分かるだろうか。
ステッピングモーター側のコネクターに入れ替えのための中継ケーブルをつなぐと見栄えが悪くなるので、筆者はマザーボード側で入れ替えることにした。
マザーボード側のコネクタは、JST XH 4ピン。

オスとメスを用意し、真ん中を交差させた中継ケーブルを作ると目的が果たせる。
真ん中の赤い2本を交差させている。
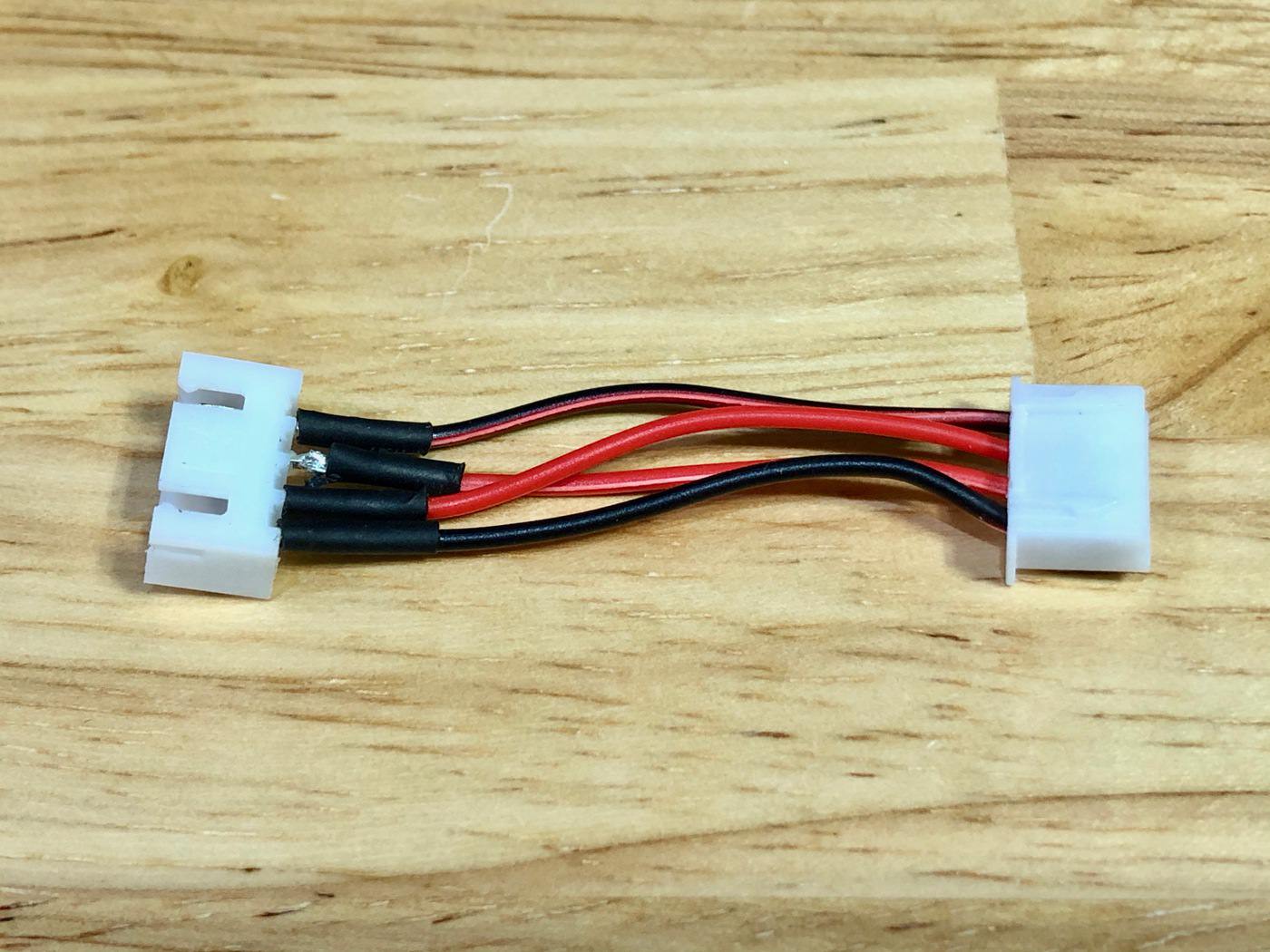
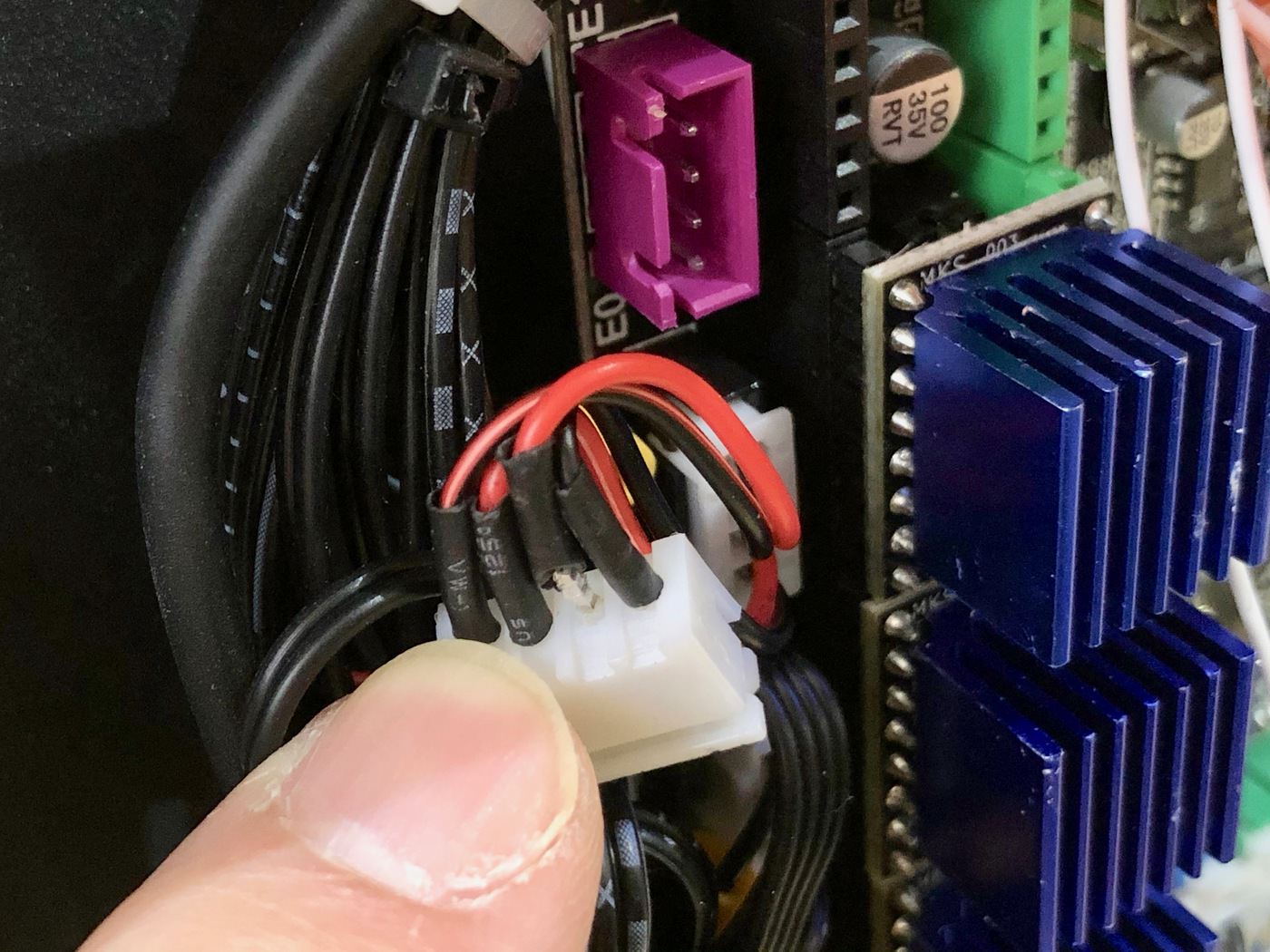
マザーボードのE0のコネクターを抜き、作った中継ケーブルを間に入れた。
設定変更
パンケーキステッパーが必要になるのは、1/3の減速ギアを使用したエクストルーダーを使うときだろう。
このときに変更する必要が出てくるのはエクストルーダーのStepsと、回転方向の設定。
StepsはG-codeのM92で設定ができる。
MK8エクストルーダーのStepsのデフォルト値はM92 E185.00。
TitanエクストルーダーのStepsのデフォルト値はM92 E766.00。
Titanエクストルーダー、BMGエクストルーダーには減速ギアが入っているので、同じ距離送り出すために、より多く回転させなければならないわけだ。
純正のファームウェアでは、robin_nano_cfg.txtのDEFAULT_E0_STEPS_PER_UNITとINVERT_E0_DIRが関連項目だ。
INVERT_E0_DIRの方は挙動に応じて0か1を選択。実際に動かしてみて逆方向に回っていたら、0と1を逆にする。
Marlinでの関連項目はDEFAULT_AXIS_STEPS_PER_UNITとINVERT_E0_DIRになる。
ステッピングモーターの配線を手探りで行う方法
今回はまだピン配列の資料があったからこの程度の考察で済んだが、出どころの不明なステッピングモーターを利用する機会もあるかと思う。
ピン配列の資料がないステッピングモーターの配線方法について、参考になる記事があった。