KINGROON KP3SのZ軸は問題を抱えていることが多い。
結果として、Z面の造形不良として顕在化しがちだ。
原因は三つある。
Z軸不良の原因
1.Z軸ステッピングモーターの取り付け不良
Z軸ステッピングモーターは、鉄板製ボディの天面に取り付けられている。
後方左側の角に位置し、鉄板製ボディのプレス加工による角の曲面に隣接していて、Z軸ステッピングモーターと接触する取り付け面の一部が平面になっていないことがあるようだ。

これに関係して、Z軸ステッピングモーターの回転軸が垂直になっていないことがあると思われる。
2.リードナットの取り付け面の板金不良
Z軸にあるリードナットは鉄板を折り曲げて作ったキャリッジに取り付けられているが、折り曲げ角が90度になっておらず、取り付け面の水平が出ていないことがある。

3.リードナット取り付け穴の位置ズレと調整代不足
Z軸ステッピングモーターの回転軸中心と、リードナットの回転軸中心が合っていないことがある。
KP3S以外の機種にはリードナット取り付け位置に調整余地を設けてリードスクリューとの位置関係を補正できるようにしているものがあるが、KP3Sにはリードナット固定位置の調整余地があまりないのもよくない。
不具合の実情
原因の1と2は個体差があるようで、問題ないレベルに収まっているものもあるようだ。
1.は回転軸の垂直が出ていないと分かったときに、調整がなかなかキツイ。

Z軸ステッピングモーターと鉄板ボディとの間にワッシャーなどのスペーサーを挟んで垂直出しを試みることになるが、緩和することはできても、この方法で完全な垂直を出すのはほぼ不可能だと思われる。
2.についてはメタルベンダーなどを使って曲げ直し、直角を出すのが本道だが、適切な道具を使わないと複雑な曲がり方をして収拾が付かなくなる可能性がある。
また、このような小さな鉄板の曲げ角が90度になっているかどうかを確認するのがなかなか難しい。
3.はZ軸ステッピングモーターが垂直に取り付けられていたとしても、その回転軸の中心とリードナット取り付け穴の中心はすべての個体でずれていると思われる。実際には1.、2.との複合的な状況から、簡単には修正ができない状態になっている個体もある。
倒立Z軸でトラブルの元凶をバイパスする
このように、正攻法でZ軸の抜本的修正をしようとすると困難がつきまとう。
現状を把握することからして、なかなか面倒というのが実情だ。
そこで、筆者は以下の問題個所をすべてバイパスして、新たにZ軸を構築し直すことを考えた。
- Z軸ステッピングモーターの取り付け不良
- リードナットの取り付け面の板金不良
- リードナット取り付け穴のズレと調整代不足
こうすれば、悪影響を及ぼす各部の状態を確認することすら必要なくなる。
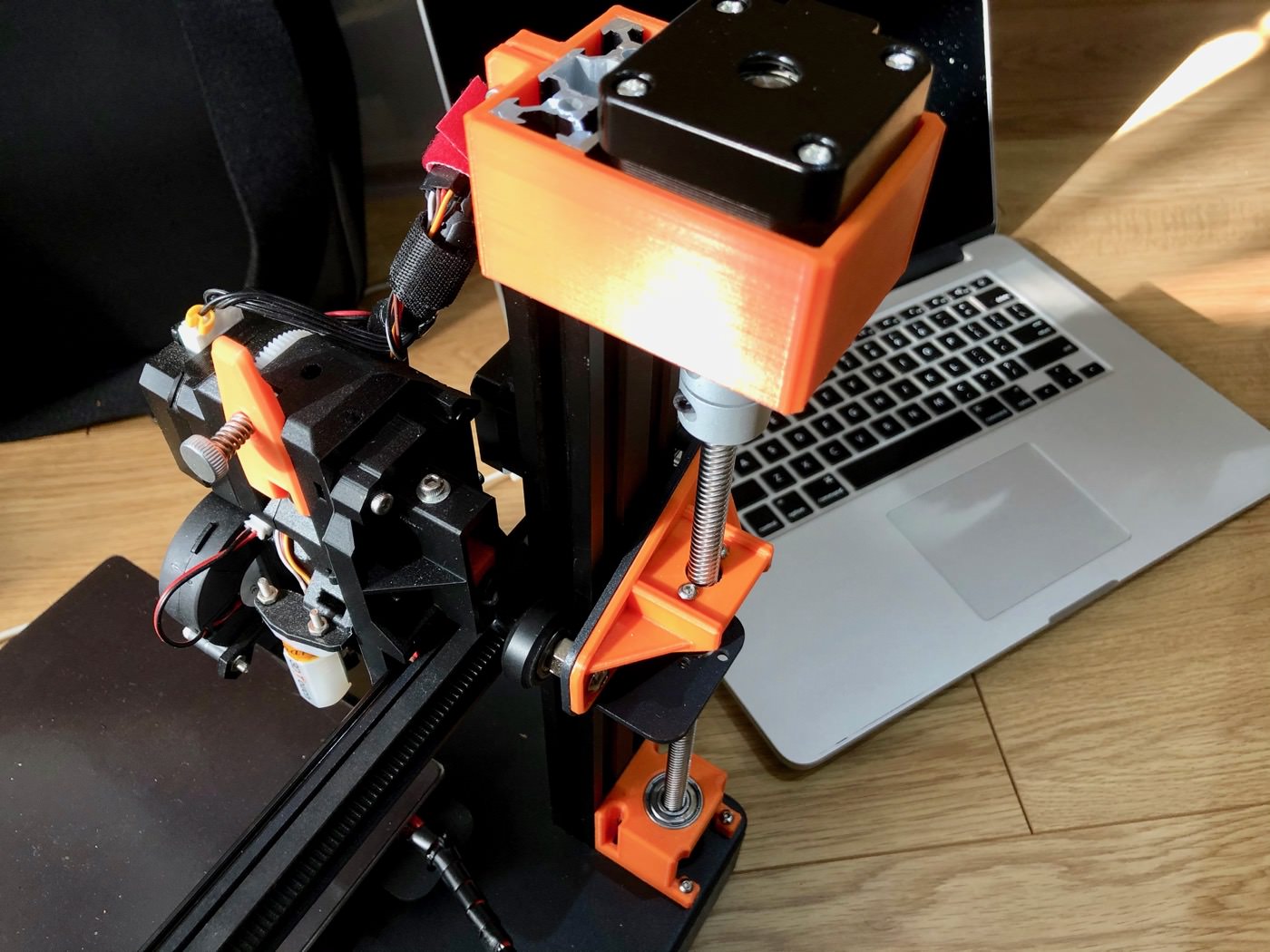
Z軸ステッピングモーターの取り付け
Z軸ステッピングモーターは、Z軸フレームのてっぺんに固定。
Z軸フレームとZ軸ステッピングモーターとが密着するように固定することによって、ステッピングモーターの軸とZ軸フレームとの並行が自ずと出るようにする狙いからだ。
下にあったZ軸ステッピングモーターを上に移動するので、倒立Z軸と名付けた。
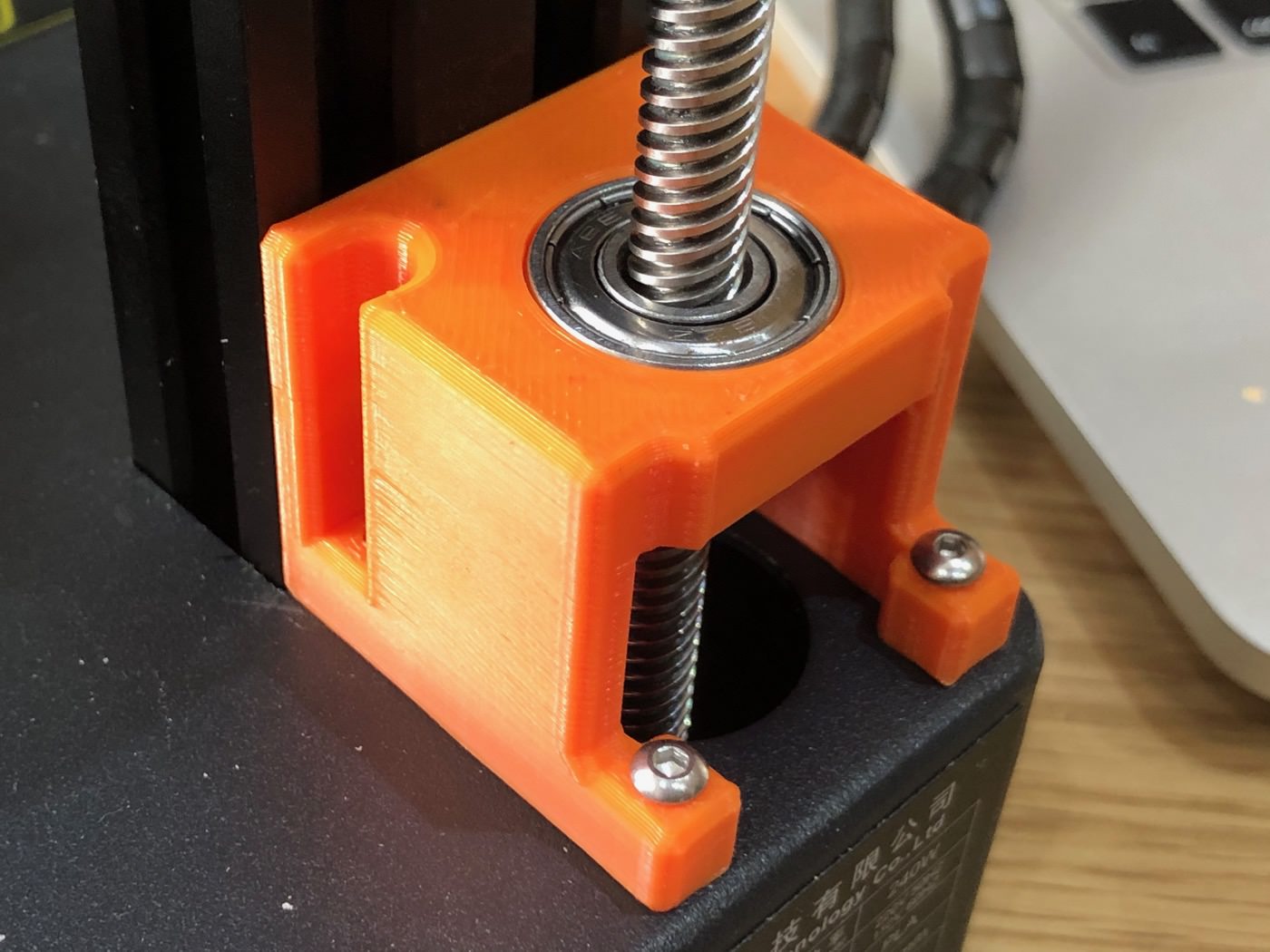
リードスクリューは、Z軸フレームと平行になるように根元側にベアリングを設置して保持するようにした。
Z軸フレームとZ軸ステッピングモーターとを密着した状態で固定すると、Z軸ステッピングモーターの回転軸の中心とZ軸フレームとの距離が計算で出る。
ベアリングの回転軸中心とZ軸フレームとの距離も当然それと同じくすることになり、ベアリング固定用パーツのジオメトリが他動的に決まる。
リードナットの取り付け面の確保
リードナットは、水平が出ているかどうか分からない元の固定穴とは別に、取付場所を新設した。
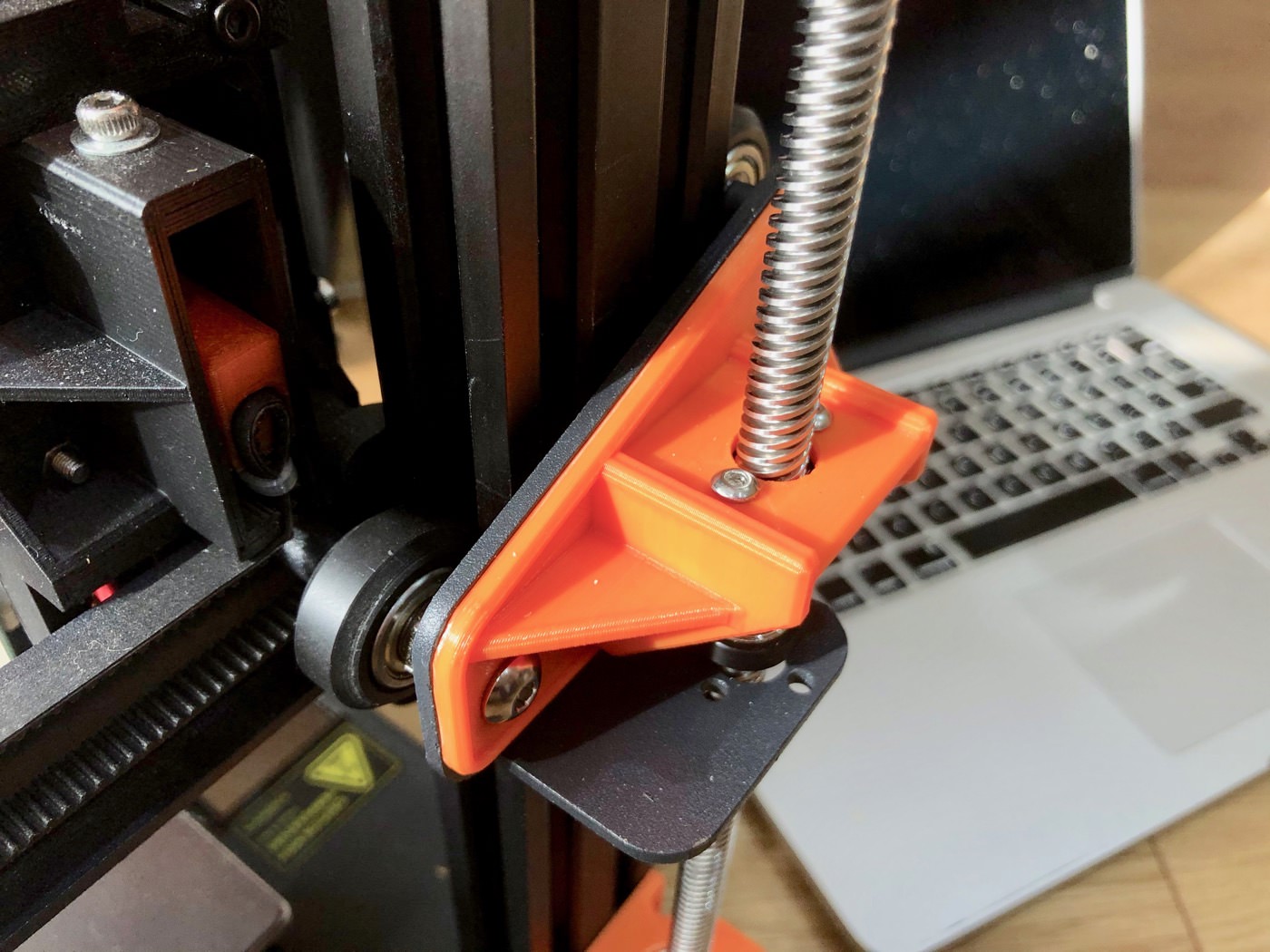
キャリッジの垂直面の、Z軸フレームに対する相対的な位置関係や垂直度は安定していると思われるので、垂直面に3Dプリンターで出力したリードナット取り付け用のパーツを取り付け、そこにリードナットを固定した。
調整代を考慮したリードナット取り付け穴に
リードナットも計算で出した位置に決め打ちで取り付けていいかというと、そうはいかない。
キャリッジの左右方向の位置はVローラーの挟み込みの強さの調整機構になっている偏心ナットの調整具合で変化するからだ。
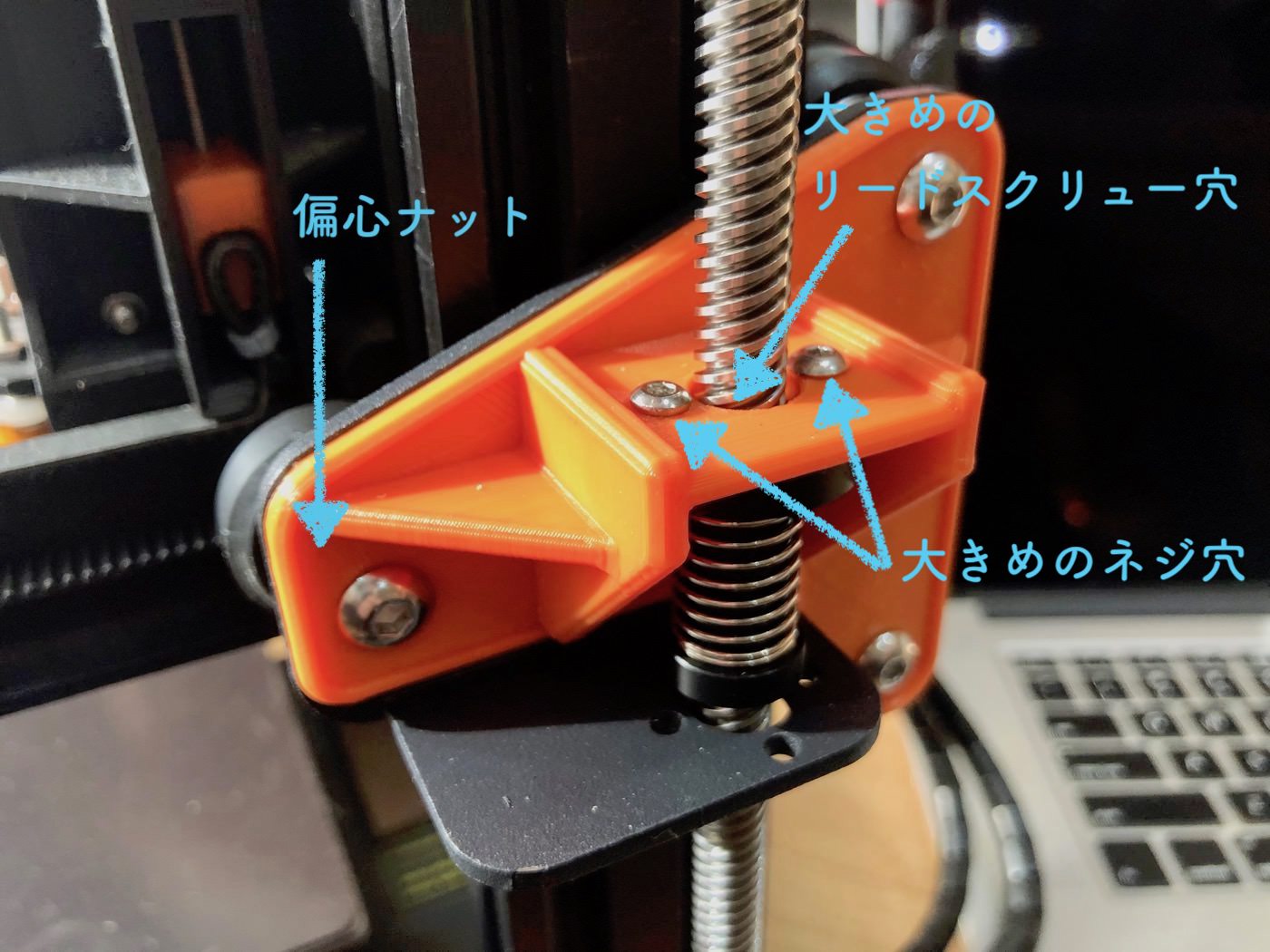
そこで、リードナット固定位置は調整が効くようにネジ穴、リードスクリューを通す穴それぞれ余裕を持たせたサイズにした。
リードスクリューを固定した後で、それに合わせてリードナットの位置を調整できるようにするためだ。
Z軸フレームの補強を追加
KINGROON KP3SのZ軸フレームは、固定強度の不足もしばしば指摘される。
Klipperによる高速印刷を視野に入れたときに、この弱点が足を引っ張る可能性がある。
リードスクリューを根元側で保持するベアリング固定用のパーツは、Z軸フレームの補強を兼ねるようにできるので、そのような作りにした。
最近のKINGROON KP3Sにはここに補強のパーツが付いているが、あまり意味がない作りに見えるので、それを取り外した上でリプレイスすることを想定している。

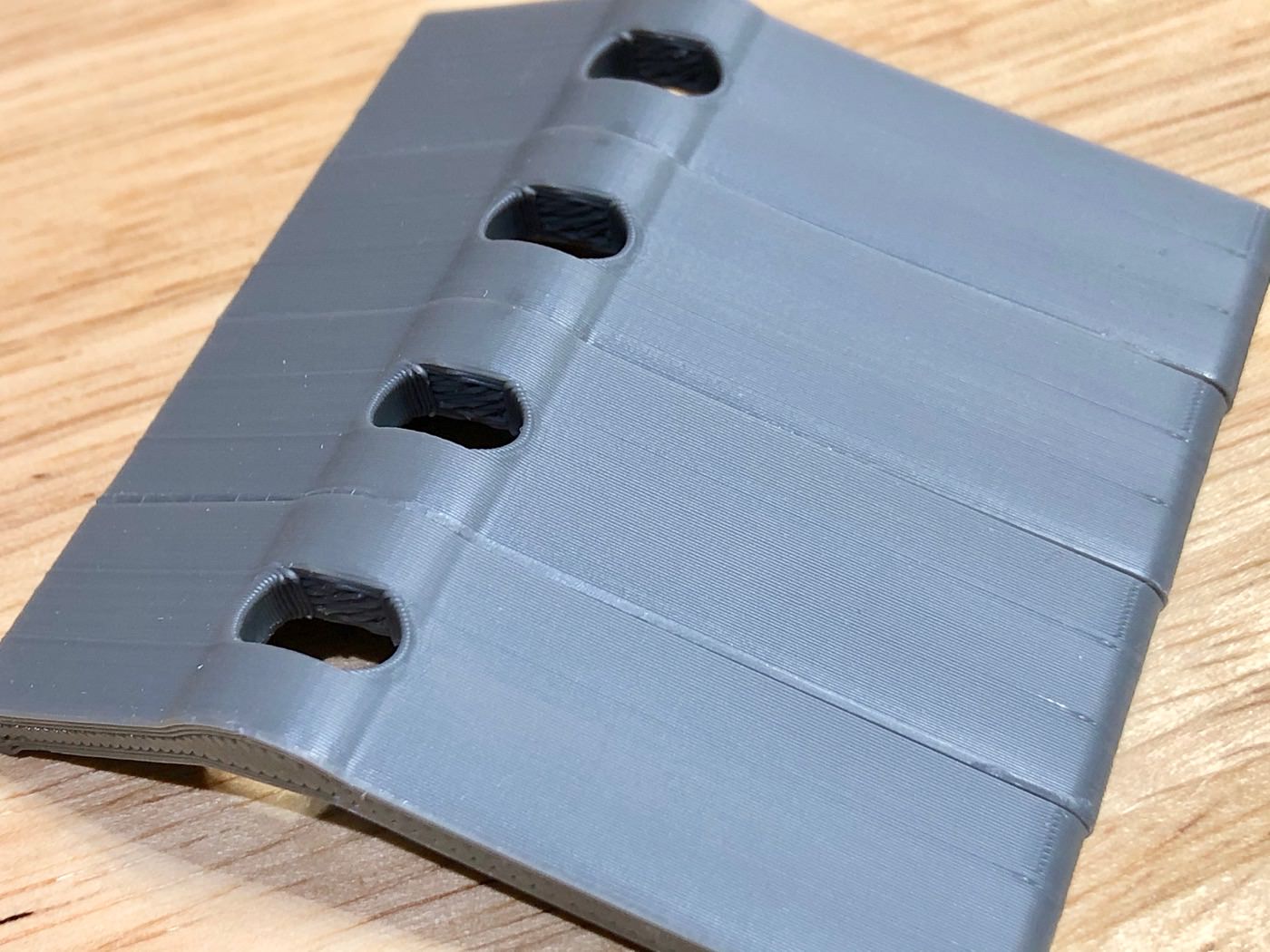
ただし、そもそもボディ天面が歪んでいるからこのような施策をしているわけで、ボディ天面と接する部分は歪みを吸収できる作りにした。(写真左側のネジ止め部分を写真のものより薄くした)
倒立Z軸の効果
このようにすると、KINGROON KP3SのZ軸を新しく作り直すことが可能となる。
工場出荷状態のZ軸はナーバスで信頼がおけず、治具の追加やノギスなどを使ったデリケートな調整を必要とするが、倒立Z軸はZ軸フレームさえ真っ直ぐであれば本機の製造段階の工作精度が影響せず、素組みでジオメトリがカッチリ決まるため、Z面の安定感が出る。
Z軸が完全にユーザーの制御下に入るため、少なくとも工場出荷時のZ軸にあるモヤっとした感じはなくなる。
一度改造を終えれば、さらなる改造も容易になるだろう。
倒立Z軸のデメリット
Z方向の造形スペースが14cm程度に減少する。
筆者は高さのあるものをプリントすることがほとんどないため、これでも全然困っていないが……。
- Z軸ステッピングモーターの取り付け位置を上にずらす方法を考える
- Z軸フレームを延長する
- アンチバックラッシュリードナットの使用を前提とした取り付け用パーツを、アンチバックラッシュリードナット非対応に改造してマージンを増やす
こういった施策でZ方向の造形スペースを拡大可能だ。
必要なもの
- リジッドカプラ
;fill-opacity:1;' d='M 4 4 C 2.90625 4 2 4.90625 2 6 L 2 18 C 2 19.09375 2.90625 20 4 20 L 20 20 C 21.09375 20 22 19.09375 22 18 L 22 6 C 22 4.90625 21.09375 4 20 4 Z M 4 6 L 20 6 L 20 18 L 4 18 Z M 4 6 '/%3E%3C/g%3E%3C/svg%3E%0A)
UniTak3D シャフトカプラー 5mm〜8mm,アルミケーシング リジッド カップリング Ender 3 V2 Ender 3 PRO CR10S CR10シリーズ3DプリンターおよびCNC Machineマシン用(2 Pcs)- 初期のKINGROON KP3Sはフレキシブルカプラを使っているが、この倒立Z軸ではカプラの下にX軸がぶら下がることになるので、フレキシブルカプラが使えない。リジッドカプラを用意する。
- ベアリング
ミニチュアベアリング 【NSK】 スチール 両シール付 608ZZ 内径8mm×外径22mm×幅7mm (2個入り)- Z軸フレームの根元でリードスクリューを保持。
- M3のTスロットナット
MroMax T-ナット Tスロットナット スライディング M3 50個 半分丸ロール 2020シリーズTナットキット 炭素鋼 ニッケルメッキ T溝ナット アルミニウム 押し出し プロフィール- Z軸フレーム根元のベアリング固定パーツ兼Z軸補強パーツの固定で使用。
- M3のネジ
- 10本(うち4本は10mm)
- M3のナット
- 6個
- JST-XH 4ピン延長ケーブル
5PCS 15 cm JST-XH 2S 3S 4S 5S 6S バランスプラグオスバスバー延長ワイヤーケーブルJST-XHコネクタアダプタワイヤー バランスリード延長ケーブルコード for RCリチウム電池 (JST-XH 3S)- Z軸ステッピングモーターをZ軸フレームのてっぺんに移設するに当たり、ケーブルを延長する必要から。間違って4Sを買ってしまわないように。3Sが4ピンだ。(3シグナル+GNDという意味)
- スコヤ、曲尺
シンワ測定(Shinwa Sokutei) 完全スコヤ cm目盛 15cm 62009
シンワ測定(Shinwa Sokutei) 曲尺 平ぴた 鉄工用 表裏cm目盛 JIS シルバー 30cm 建築 10297- Z軸ステッピングモーター移設のために取り外す際、Z軸フレームの固定金具を外すことになる。復元のためにスコヤや曲尺を使ってZ軸フレームの垂直を出す必要が出てくる。これが用意できないうちはZ軸フレームの垂直出しがほぼできないので、Z軸を分解しない方がいい。






プリント部品
倒立Z軸に必要なプリントパーツはこちらで公開している。
- Z軸ステッピングモーター固定パーツ
- リードナット取り付けパーツ
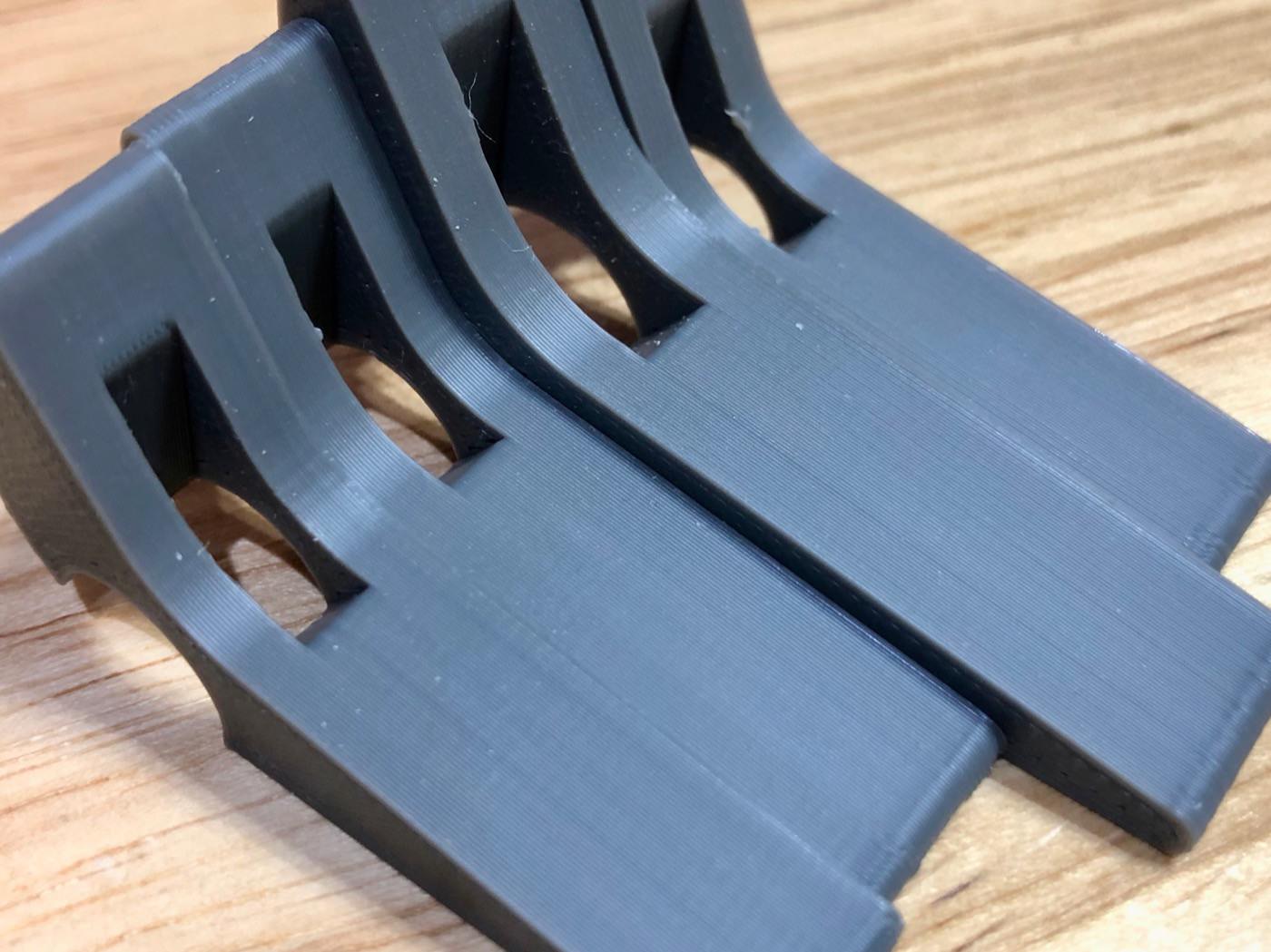
- リードスクリューベアリング保持兼Z軸フレーム補強パーツ
この3つからなる。できるだけ頑丈に出力した方がいいだろう。
取り付け方法
Z軸の分解
- ノズルがベッドに激突しないよう、つっかえ棒ならぬつっかえ箱のようなものをX軸の下に入れてからカプラを外し、リードスクリューを抜き取る
- リードナットを取り外す
- Vローラーを固定する3本のネジを外してキャリッジを分解し、Z軸フレームから取り外す(この際、Vローラーが意外にバラバラになり、多数のパーツが出てくるのでなくさないように注意)
- 本体裏面の蓋を外す
- Z軸フレーム根元のネジを外し、Z軸フレームを外す
- Z軸フレーム根元を固定する金属製のステーのネジ4本を外す
- Z軸ステッピングモーターを外す

Z軸フレームの取り付け
- Z軸フレーム固定金具を4本のネジで取り付けるが、ネジは完全には締めない(写真ではベッドを外しているが、意外に取り付けが面倒くさいので外さない方がいい)
- Z軸フレーム固定金具にZ軸フレームを2本の太いネジで取り付ける
- 裏蓋はまだ取り付けない
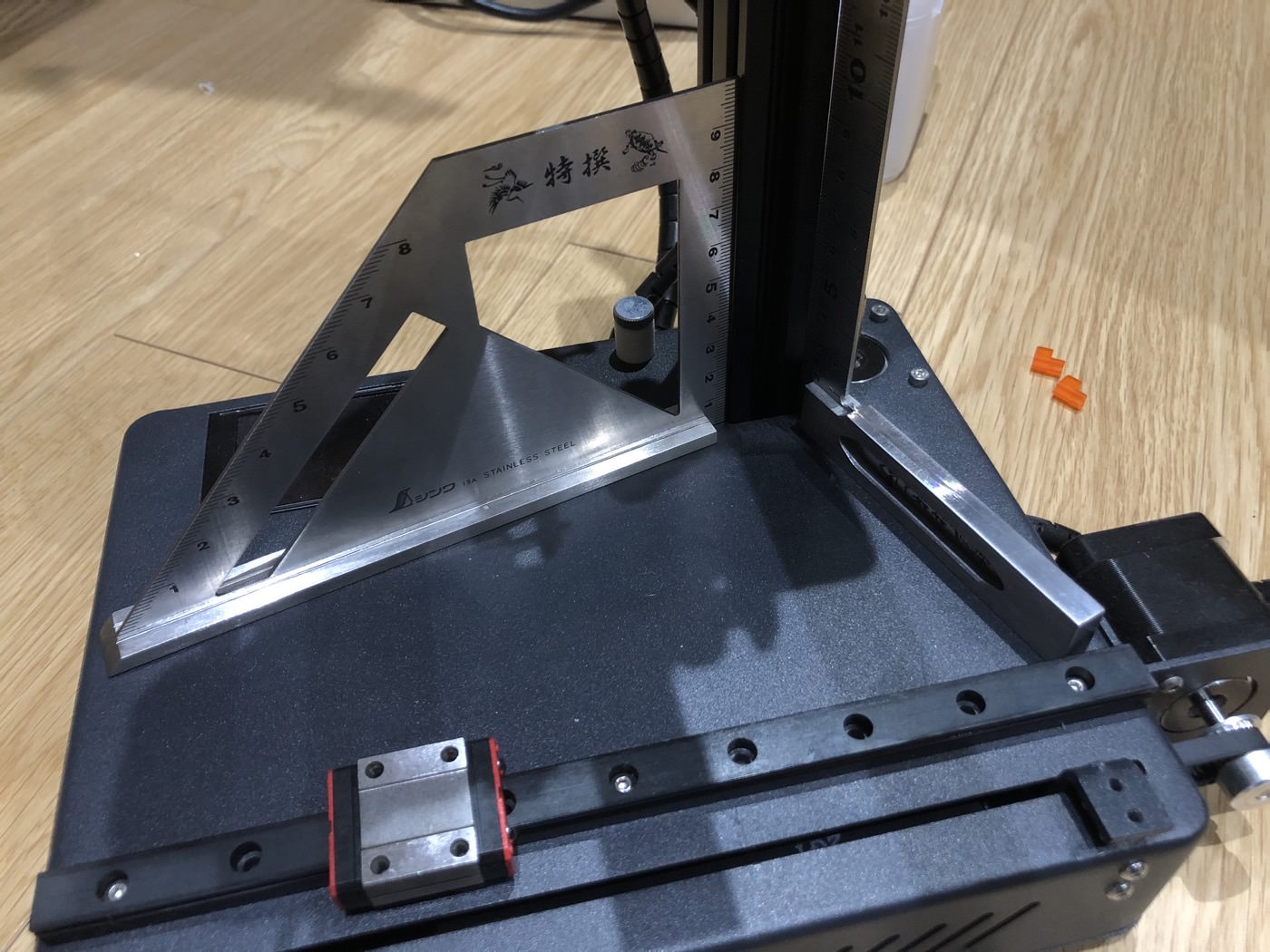
- 本体を使用時の向きに戻し、Z軸フレームにスコヤや曲尺をぴったり当てながら、垂直を調整する。可能なら2方向から同時に当てる。スコヤを強く押し付けることで垂直がキープされるようにしながら、Z軸フレーム固定金具のネジを4本代わる代わる少しずつ締めていく。垂直が狂ったらやり直す(写真ではベッドを外しているが、意外に取り付けが面倒くさいので外さない方がいい)

リードスクリューベアリング保持兼Z軸フレーム補強パーツの取り付け
- リードスクリューベアリング保持兼Z軸フレーム補強パーツにベアリングを圧入
- M3ネジ8本、ナット4個、Tスロットナット4個を用意
- リードスクリューベアリング保持兼Z軸フレーム補強パーツのZ軸フレーム側に10mmのM3ネジ4本とTスロットナットをセット
- Z軸フレーム側のネジ4本を仮締め
- Z軸ステッピングモーター固定用ネジ穴の方にもM3ネジをセット
- 本体を横倒しにし、天面裏側からM3ナットで締める
- 仮締めしておいたZ軸フレーム側の4本のネジも本締め
- 外していた裏蓋を閉じる
X軸ガントリーの組み立て
- リードナット取り付けパーツにリードナットを仮止め。ネジはリードナットの位置が調整できる程度に緩くしておく
- Z軸フレームからは外したまま、新たにリードナット取り付けパーツを元々のリードナット取り付け用パーツの上にかぶせた状態でXガントリーを組み立てる。偏心ナットは後で調整するので、そこのネジはきつく締めない
- Z軸の上からXガントリーを差し込んでいく。差し込みがきつければ、偏心ナットを回して緩くする。ケーブルの長さが足りなければ、いったん結束バンドを切断してフリーにする
- Xガントリーががたつかないよう、偏心ナットを回して手を離してもXガントリーが落ちてこないギリギリの辺りに調整し、Vローラーを締めているネジを本締めする
Z軸ステッピングモーターの取り付け
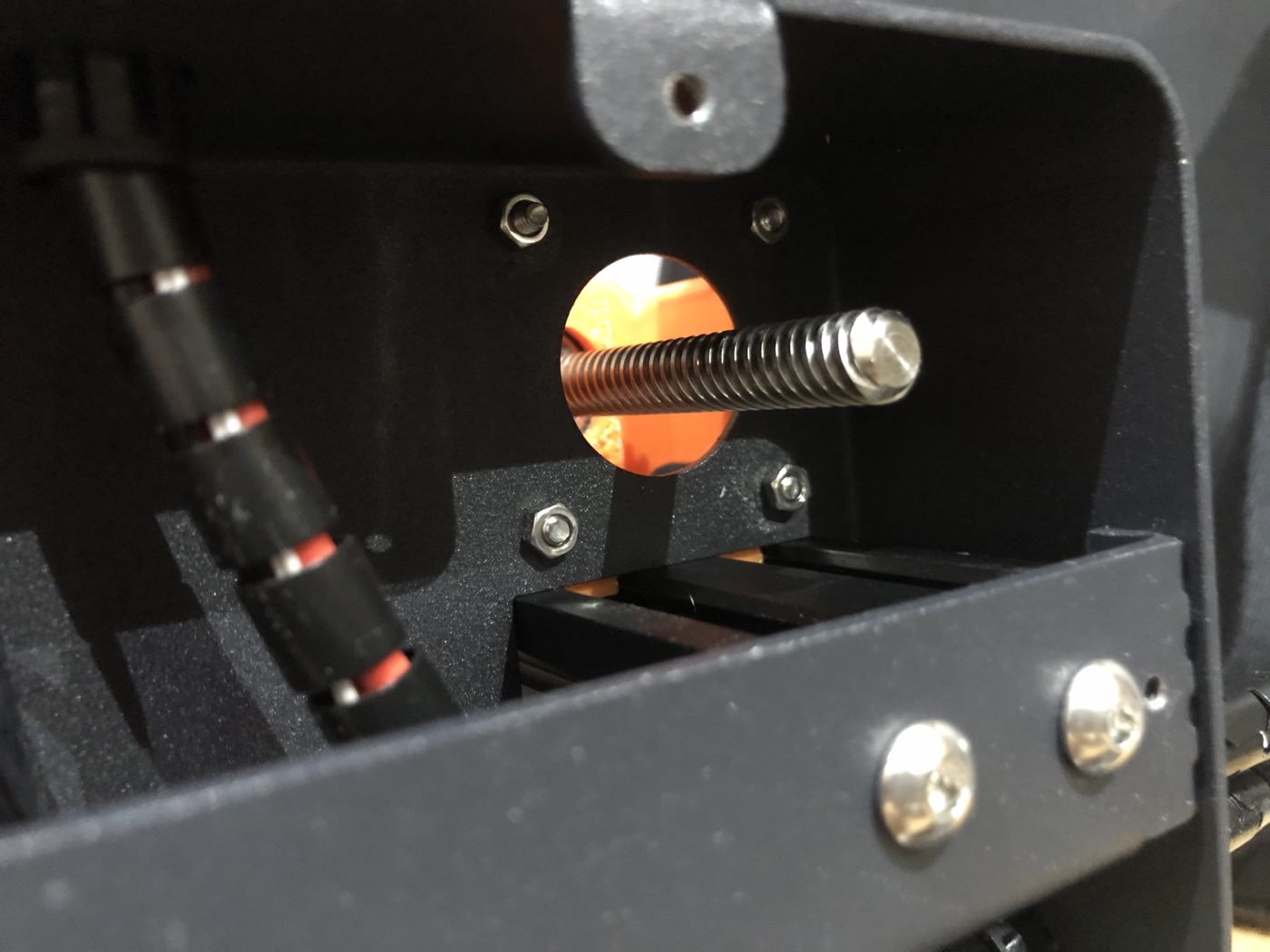
- リードスクリューを差し込む
- リードスクリューのてっぺんにリジッドカプラを固定する
- Z軸ステッピングモーター固定パーツにM3ナットを埋め込む
- Z軸ステッピングモーター固定パーツをZ軸フレームのてっぺんに固定し、M3ネジを仮締めする
- コネクタが本体正面から見て左側に来るようZ軸ステッピングモーターをZ軸ステッピングモーター固定パーツの上から下を向けて差し込み、リジッドカプラを介してリードスクリューと連結
- リジッドカプラのネジを締める
- Z軸ステッピングモーター固定パーツのネジを締めてZ軸ステッピングモーターをZ軸フレームに完全に固定
リードナットの固定
仮止めしていたリードナットを固定する。
配線
あとはZ軸ステッピングモーターの配線を延長すれば物理的な作業は完了となる。
マザーボードのZ Motorに取り付けられているハーネスをいったん外し、取り外したZ軸ステッピングモーターの方に取り付け直す。
用意したJST-XH 4ピン延長ケーブルを数珠つなぎにして、マザーボードのZ Motor端子からZ軸ステッピングモーターまで持っていく。
必要があれば、スパイラルチューブでカバーする。
ファームウェアの調整
最後に、Z軸ステッピングモーターの回転方向を逆にする必要がある。
標準のファームウェアであれば、robin_nano_cfg.txtの「INVERT_Z_DIR 1」を「INVERT_Z_DIR 0」に書き換え、ファームウェアをインストールし直す。
Marlinであれば、Configuration.hの「INVERT_Z_DIR true」を「INVERT_Z_DIR false」に書き換えてインストールし直す。